Parallel Haptic Device with 7 Degrees of Freedom
Developed by: Patrice LambertOperational since: 2014
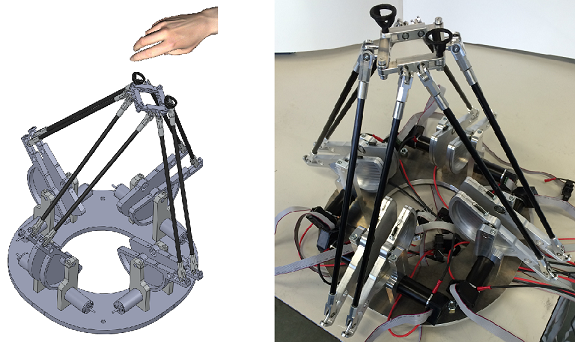
Abstract
This novel parallel architecture provides 6 DOF motion and 1 DOF grasping capabilities while all the motors are located at the base, controlled by a Bachmann industrial conroller. Parallel robotic devices are widely used now in haptic applications, thanks to their high stiffness and low inertia, which improve the mechanical bandwidth of the device. Classical parallel haptic devices usually do not provide grasping capability since all motors are located on the base. Grasping capability is sometime desirable to allow the operator to feel the shape and stiffness of the manipulated objects. Thanks to a novel configurable platform, the grasping capability of this haptic device is part of the mechanical architecture itself and can be fully controlled by base-located motors.
A video of the 7 DOF: