Real-world tests at Renault
Timo Melman and Niek Beckers just got back from their real-world tests at Renault.

Driving in eco-mode is good for the environment and your wallet, so why doesn’t everybody always drive in eco-mode? Unfortunately, the thing that makes an ECO mode so efficient is also its biggest nuisance; this mode also prevents you from accelerating even when you really need it, such as when entering a highway or a hilly road, or driving away from a roundabout. Switching it off and on is annoying, and as a result, eco-mode is not used enough. But what if an eco-mode would proactively enable you to briefly receive extra power to accelerate while still being efficient?
Last week, two researchers from TU Delft’s Cognitive Robotics department, Timo Melman and Niek Beckers, tested a new eco mode that gives additional power only when you really need it. After eight months of developing the system together with David Abbink, they spent nine days at Renault Technocentre in France to implement their system in a Renault Talisman. Thirteen experts from Renault (including the global director of advanced engineering) participated in the tests on French roads. They unanimously praised the innovative system, and as a result, Renault decided to shortlist the system for production and market release.
Proactively adapting the car settings
The proactive eco mode anticipates when extra power is needed based on predictions of the driver’s behavior in the near future (see picture below). Based on the driver’s anticipated route, it predicts when the driver needs power and how much. These predictions are then used to proactively adapt the car’s behavior before the driver needs it using simple decision logic. ‘In other words, because we look into the ‘future’, the car is ready before the driver is going to accelerate. Using this approach we help the driver to more easily accelerate, while the driver is actually still driving eco,’ says Niek Beckers. ‘Similarly, we can adapt the throttle behavior again once the driver is done accelerating to make it easier to maintain speed.’ They designed the system to allow for driver personalization. Timo and Niek continue: ‘We envision that over time the decisions when to change and what to change in the car will adapt to an individual driver’s needs.’
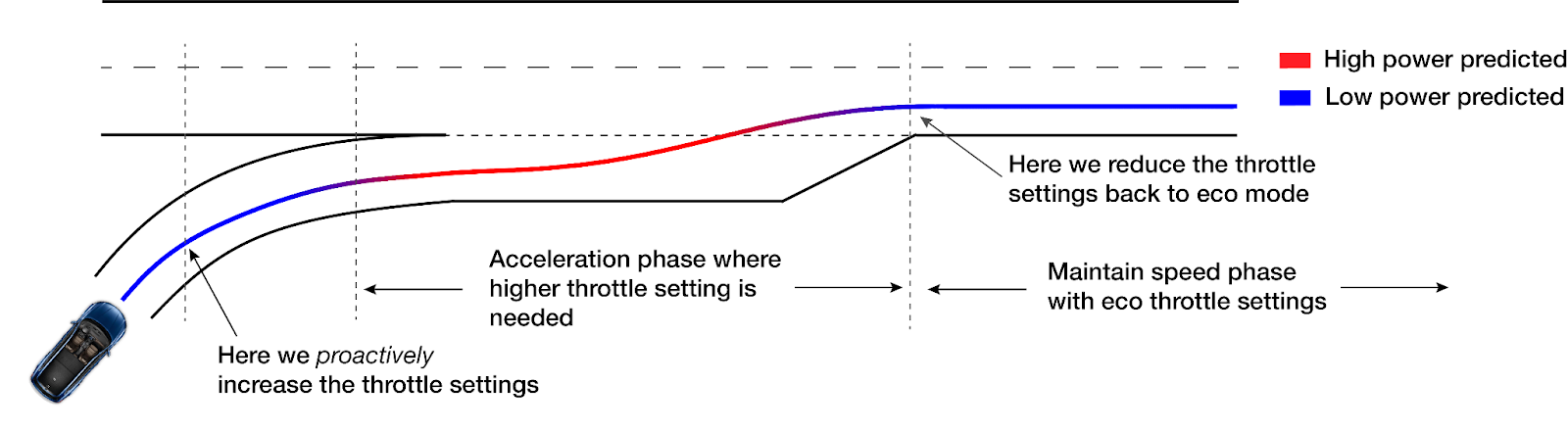
The proactive eco mode algorithm.
Human-centered interaction design
‘We know that supporting human behavior in the real world is challenging. Predicting what assistance is actually helpful across different contexts is really hard, which may result in a support system that people dislike.’ says Timo Melman. ‘The design philosophy we based our system on addresses this challenge via a three-pronged approach: 1) by striving towards accurate estimation of driver behavior at location-specific scenarios, 2) by taking expected behavioral adaptation into account, and 3) by acknowledging our predictions won’t always be correct, and therefore always ensuring the system is responsive to the driver’s current intention.’ Timo continues: ‘So, the system does a pretty good job at predicting when you would like extra power, but we also allow drivers to request extra power.’ ‘This is a prime example of how our group’s fundamental research in human-robot interaction leads to real-world applications’, says David Abbink, who headed the collaboration between Renault and TU Delft. This approach is in line with the concept of meaningful human control, as explored by the interdisciplinary research programme AiTech of which Abbink recently became scientific director. This cross-faculty programme aims to understand how to develop intelligent systems that are both transparent and explainable to humans.
From the lab to the real world
Within a limited time of only nine days, Timo and Niek implemented the proactive eco mode in a Renault test car and performed tests on the real road to several engineering experts and top managers at Renault. ‘All participants were unanimously positive about the way the system allowed them to faster reach their target speed and to maintain it, and about the added value of the end system.’ says Niek. For Timo Melman this demo concludes the end of his PhD adventure. ‘To see how my Ph.D. research resulted in a working system that will be patented and likely implemented in future vehicles, is beyond amazing’.
More information
The adaptive eco mode system was developed through a collaboration between the Cognitive Robotics Department at TU Delft and Groupe Renault. The core team consisted of Timo Melman, Niek Beckers and David Abbink (CoR) and Xavier Mouton from Groupe Renault. The test was the capstone experiment of a Renault-funded PhD project of Timo Melman, under supervision of David Abbink, Joost de Winter and Adriana Tapus (ENSTA ParisTech). Please contact Niek Beckers (N.W.M.Beckers@tudelft.nl) and Timo Melman (T.Melman@tudelft.nl) if you would like to learn more!
Paper ArXiv: https://arxiv.org/abs/2006.16572v3.


