Responsible adaptation of lane-keeping assistance
Lead: Timo Melman2016-2018 (Research Project, Completed)
Abstract
How can we assist drivers in lane-keeping, without inducing them to misuse this assistance to drive faster? This question relates to behavioral adaptation: a central concept in the design of assistance systems that we know in daily life as “the road to hell is paved with good intentions…”. It states that when we design systems that support humans, they often adapt their behavior in a way that mitigates the very benefits that the system aimed to realize. Advanced driver assistance systems (ADAS) are a well-known example of designs were anticipated safety benefits are diminished because drivers show undesired behavioral adaptations. Literature shows that ADAS lead to increased risk-taking, such as driving at a higher speed, driving closer to a lead vehicle, or performing distractive non-driving tasks[1].
Problem: knowledge of behavioral adaptation not used in design process
Unfortunately, the empirical understanding of behavioral adaptation is always pointed out in hindsight, which does not prevent it. In the spirit of TU Delft’s symbol Prometheus, we used our understanding of behavioral adaptation with foresight, and incorporated it a priori in the design of a novel ADAS, to reach a safer equilibrium in human-machine co-operation.
Project Methodology and Results: lane-keeping assistance that avoids speeding
Addressing a societal problem – Traffic safety (and throughput) is the particular societal challenge we addressed. Currently, we face unacceptable deaths (1.3 million traffic deaths worldwide), injuries and traffic jams. ADAS potentially can contribute to reducing these, but their potential benefits are undermined by the undesirable effects of human behavioral adaptations. As such, the conventional design approach may lead to ‘proven benefits under experimental conditions’, but does not contribute enough to human welfare in the real world.
Societal values & use – Our ADAS designs do not enforce a design engineers’s principles on the user, nor do they rely on annoying binary warnings, nor do they reduce drivers to the inhuman task of acting as a ‘back-up system’. Instead, they are based on haptic shared control, which allows drivers to continuously feel (and interact with) the vehicle automation through forces on the steering wheel, similar to the intuitive physical interaction between horse and rider through the reins. This design concept keeps drivers comfortably in the control loop with an interface that allows them to intuitively build up a relationship with the automation, and correct or overrule when they desire. All this while making it easier to drive safely. We foresee that – as intelligent assistance systems are becoming indispensable parts in our daily lives – understanding and incorporating their anticipated misuse in the design of these intelligent systems will become imperative. We are continuing this line of work, amongst others in AiTech, TU Delft’s new program on meaningful human control of intelligent systems.
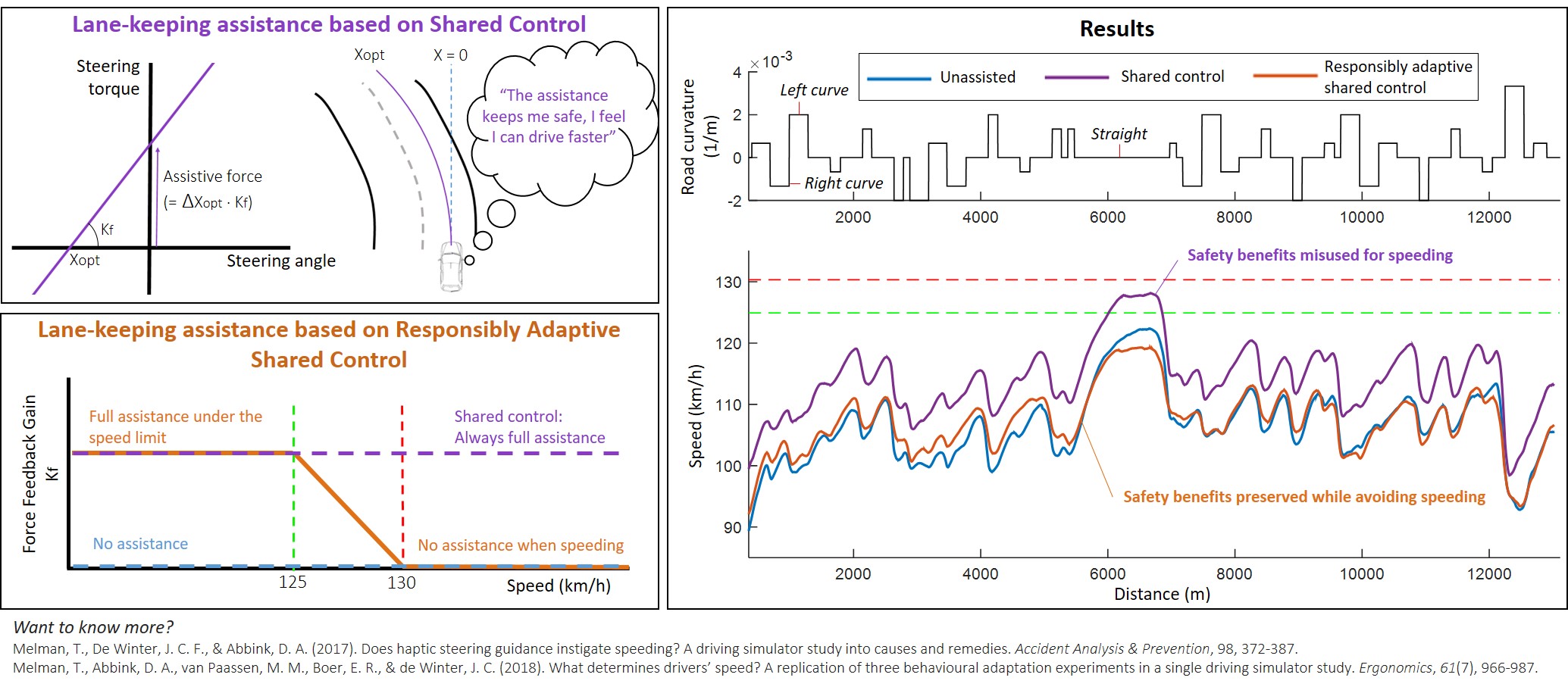
Risks – The anticipation of potentially negative side-effects constitutes the essence of this project. We critically reflected on the concept of haptic shared control we helped develop earlier. Although literature shows it reduces many risks associated with autonomous driving (such as accidents due to overreliance), we anticipated the assistance might instigate behavioral adaptations such as speeding. Therefore, in this study we aimed to 1) conventional haptic shared control instigates speeding, while at the same time 2) designing and evaluating a responsibly adaptive solution that positively entices drivers to prefer the benefits of shared control for safe speeds over reckless driving. You can still drive recklessly if needed, our design just does not entice you in doing so.
Inclusiveness – During the design of the responsibly adaptive assistance, we consulted end-users (drivers) as well as stakeholders from automotive OEM (Nissan), haptic device manufacturers (Moog), policy makers (AAA, ‘the american ANWB’), alongside scientific experts in human factors, psychology, behavioral adaptation and design.
Transparency – By its very nature, haptic shared control makes the automation’s capabilities and actions transparent to the user, allowing the driver to correct or overrule simply by exerting a bit more force. The underlying controllers are parametric, making them transparent to society. Finally, in our research publications we included the entire dataset as supplementary material, so that scientists can reproduce and crosscheck our findings.
Innovative & Creativeness – This is the first study that anticipated on drivers misusing safety benefits of lane-keeping assistance, included that in a design solution that would theoretically mitigate this misuse, and showed empirically that it was successful in mitigating misuse. Note that the main innovation of this work is not technical, nor is it behavioral. Our innovation lies in operationalizing our conviction that we should not pursue the safest technical system, but the safest joint human-machine system.
[1] Elvik, 2013. Impact of behavioural ecology. In: Rudin-Brown, C., Jamson, S. (Eds.), Behavioural Adaptation and Road Safety, 374. CRC Press, Boca Raton, pp. 371–384; Hiraoka et al. 2010. Behavioral adaptation to advanced driver-assistance systems. Proc. SICE Annu. Conf., 930–93 ; Martens & Jenssen 2012. Behavioral adaptation and acceptance. In: Eskandarian, A. (Ed.), Handbook of Intelligent Vehicles. Springer-Verslag, London, pp. 117–138; Mehler et al. 2014. Evaluating technologies relevant to the enhancement of driver safety Washington. AAA Foundation for Traffic Safety, DC ;
Status:
Completed
Associated Research Programme:
Supervisors:
Involved Researchers:
Project Output:
- Melman, T., de Winter, J. C. F., Abbink, D. A. (2017). Does haptic steering guidance instigate speeding? A driving simulator study into causes and remedies. Accident Analysis & Prevention, 98, 372-387.
- Melman, T., Abbink, D. A., van Paassen,M.M., Boer, E.R., De Winter, J.C.F. (2018). What determines drivers’ speed? A replication of three behavioural adaptation experiments in a single driving simulator study. Ergonomics, 61:7, 966-987
Involved Companies:
- Nissan (Tomohiro Yamamura)
- AAA (John Sullivan)
- Moog