Teun wins ASME Design Competition
With a novel parallel haptic master device for steerable needles, Teun has won first prize in the ASME Student Mechanism and Robot Design Competition (Graduate Division). The finals of this competition were held during this year’s ASME International Design Engineering Technical Conferences (IDETC), held 2-5 aug in Boston, USA. To win the competition, Teun had to pitch his design and subsequently demonstrate it to an international, multi-disciplinary jury.
The parallel haptic master device, shown below, is the first haptic master device dedicated to the task of needle steering. It has been developed within the H-Haptics programme in collaboration with the TU Delft MISIT lab (www.misit.nl), who will use the device to allow more intuitive control over their steerable needles. As such, this device will support the further research into steerable needles for more accurate needle insertion, which is believed to improve the well-being of future patients. It was first demonstrated during our tutorial at World Haptics 2015.

The 2015 Student Mechanism and Robot Design Competition award is handed to Teun by Girish Krishnan, the contest organizer
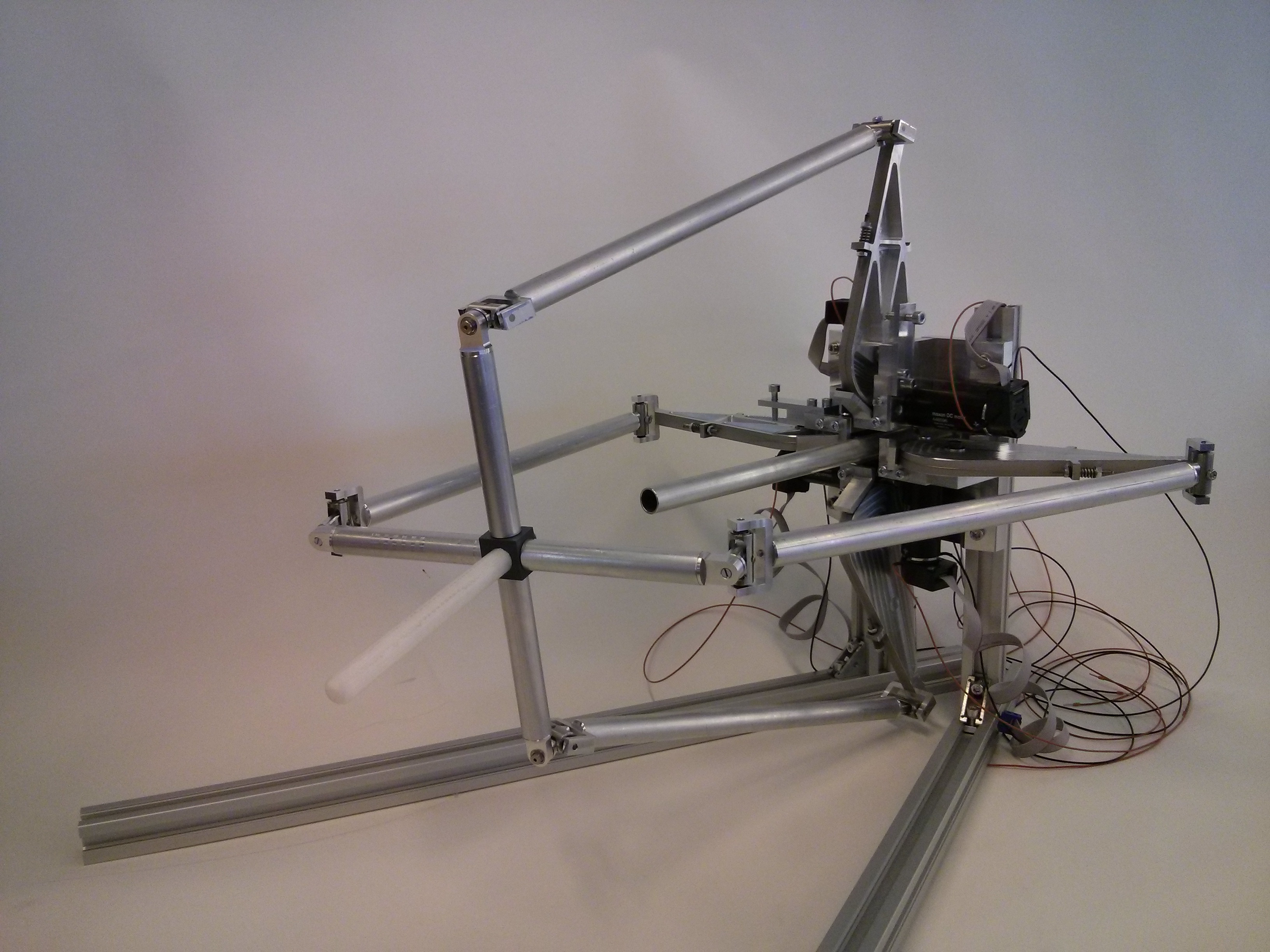
The award-winning parallel haptic master device for steerable needles, developed at the Delft Haptics Lab. It has 3 degrees of freedom, namely one linear translation and two rotation, which makes it compatible with the steerable needles developed at the TU Delft MISIT lab