Haptic Shared Control for a Lifting Aid in Care environments
Lead: Jack Schorsch2011-2015 (PhD Project, Active)
Abstract
The aim of Jack Schorsch’s PhD project is to realize a breakthrough in the physical support of healthcare workers for lifting and assisting patients, by designing and evaluating an exoskeleton-like assistive device. The exoskeleton will be powered only to partly compensate the weight of the patients, will use shared-control assistive technology. The main design goals include: reduction of physical load, intuitive control, quick to don and doff.
This project is part of large research programme named Human-centered Haptics.
Although many assistive devices exist which can help in moving patients, none are flexible enough to be used without problems in the care industry. Most devices are bulky, limited in lifting loads, unable to handle varying loads, slow in operation, or need extensive training before they can be used. Most suffer from all of these and are therefore mostly unpopular with healthcare workers.
The aim of the project is to show that by using knowledge of how people make natural mo
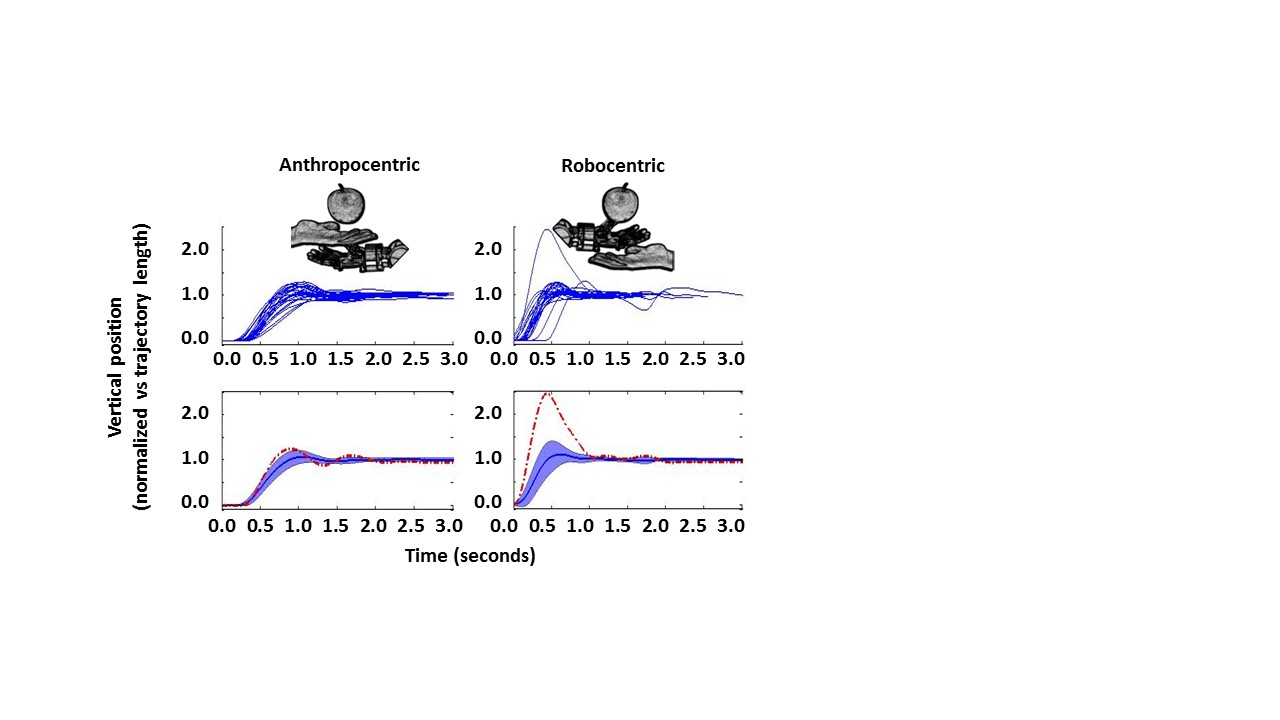
tions, haptic shared control can be used to support ergonomically beneficial, but unnatural assistance to the user. By using our kn
owledge of human behavior, especially when we place them into a new situation, we want to design a controller which makes the underlying support totally understood by the user. This means that a new operator, who has never seen the system before, can start using it immediately, with no training.
Status:
Active