Machine Learning for Haptic Shared Control in Telerobotics
Lead: Frank Hoeckx2015-2016 (MSc Project, Completed)
Abstract
Teleoperation involves performing tasks in a remote environment by controlling a robot from a distance. These tasks are hard to perform due to e.g. limited visual and haptic feedback from the remote environment. In order to improve task execution the operator can be supported by means of augmented guidance forces. More specifically, in Haptic Shared Control the intentions of an autonomous agent are continuously communicated by means of forces.
The haptic guidance trajectories are currently designed according to assumptions of optimality and are not necessarily intuitive for the human operator. This leads to disagreement and conflict forces between the human operator and the controller, which can lead to an increase in operator workload and a decrease in task performance.
The currently used methods are one-size-fits-all approaches, without taking the individual movement preferences into account. These preferences could be determined by Machine Learning methods that build a model based on movement demonstrations. The method used here is the Task-Parameterized Gaussian Mixture Model (GMM). This model is capable of providing trajectories for situations with starting points and end points the are different than those used in the demonstrations.
The goal of this study is to investigate the performance of Haptic Shared Control with guidance trajectories based on this GMM. It is hypothesized that the performance is not deteriorated, while the individual movement preferences are captured, leading to less conflicts.
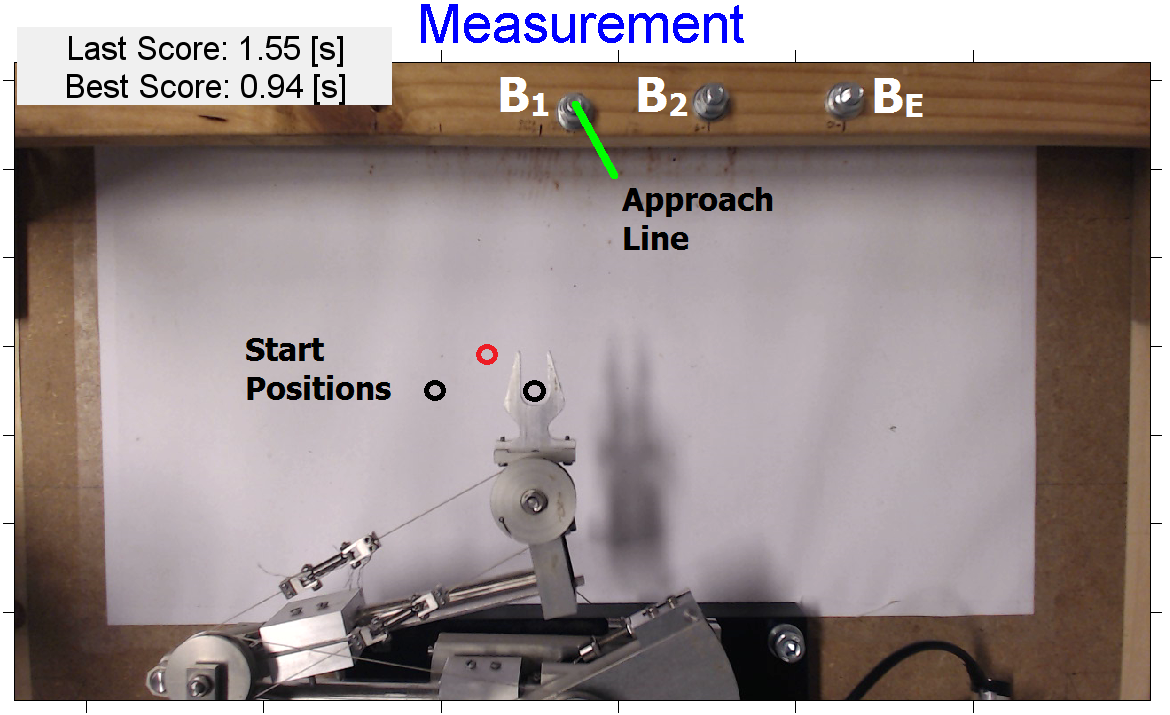
A human factors experiment has been designed on the Munin, a 3-Degree-Of-Freedom planar teleoperation setup. The subjects conducted a free-space movement task in which a spanner is moved from various starting points to a fixed amount of bolts. These bolts are the end points, varying in position as well as orientation (i.e. approach angle). The GMM condition is compared with manual control as a baseline, as well as with a minimum jerk model, which is a commonly accepted model based on human movement studies.