Ankle Manipulator
Developed by: David AbbinkOperational since: 2002
Abstract
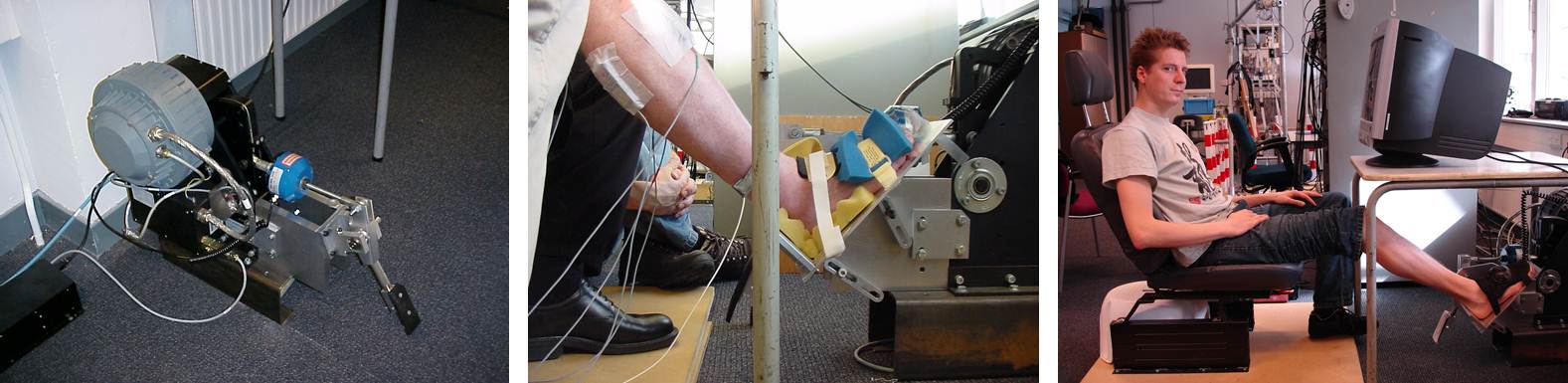
This haptic ankle manipulator was developed in 2002 by David Abbink during the first year of his PhD thesis, to study neuromuscular behaviour during gas pedal control. It was designed around an admittance-controlled H-motor by Moog-FCS, and included a simulation & visualization developed by Mark Mulder, to match the driving simulator developed in the HMI lab. Essentially it acted as a simplified driving simulator, capable of measuring endpoint admittance of the foot while car-following. Later on, the setup was adapted to study pure ankle rotations, and as such was used in studies of Erwin de Vlugt at the NMC lab, which ultimately led to the development of the Achilles, supported by Piet Lammertse and Moog-FCS.
After several years of disuse, Mark Mulder is now aiming to use this system for new medical research.
Associated Research Programmes:
Associated Research Projects:
Acknowledgement:
This system was designed with help of Moog FCS who provided the H-Motor, with Richard v/d Linde who helped with the rest of the hardware design. Funding was provided by Nissan Motor Company, for David's PhD thesis in 2002-2006.