“PentaG” (5 DOF Master Device)
Developed by: Patrice LambertOperational since: 2010 and 2012
Abstract
The 5 DOF PentaG is a robot generating 3T1R motion (3 translations + 1 rotation) plus a linear grasping motion based on the novel concept of parallel robots with configurable platforms. In this new class of robot architecture, the rigid (non-configurable) end-effector is replaced by a closed-loop chain (the configurable platform). Some of the links of this closed-loop chain are attached to the legs so its configuration can be fully controlled from motors located on the base. The use of a closed-loop chain instead of a rigid end-effector allows the robot to interact with the environment from multiple contact points on the platform. This results in a robot that can combine motion and grasping capabilities into a structure that provides an inherent high structural stiffness since all the motors are grounded on the base and no additional motor is needed at the end-effector location to provide the grasping. The resulting high structural stiffness provides good mechanical transparency while the grasping capabilities allows the operator to use his index and thumb to grasp and interact with the objects in a more natural way than with a single point contact.
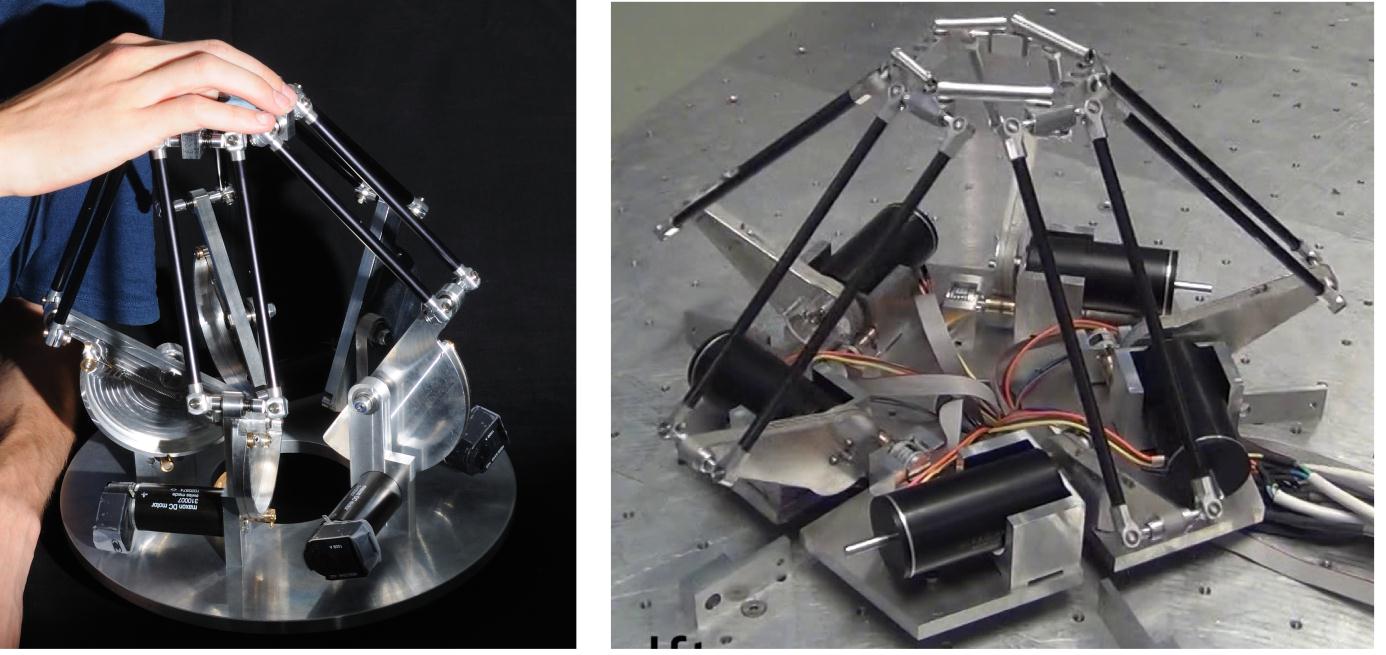
The first (left) and second (right) prototype of the PentaG parallel robot.
The PentaG manipulator, used as a master device of remotely opening doors