Opening doors with a remotely controlled mobile robot, using shared control and underactuated grasping
Lead: Atli Sverisson2011-2012 (MSc Project, Completed)
Abstract

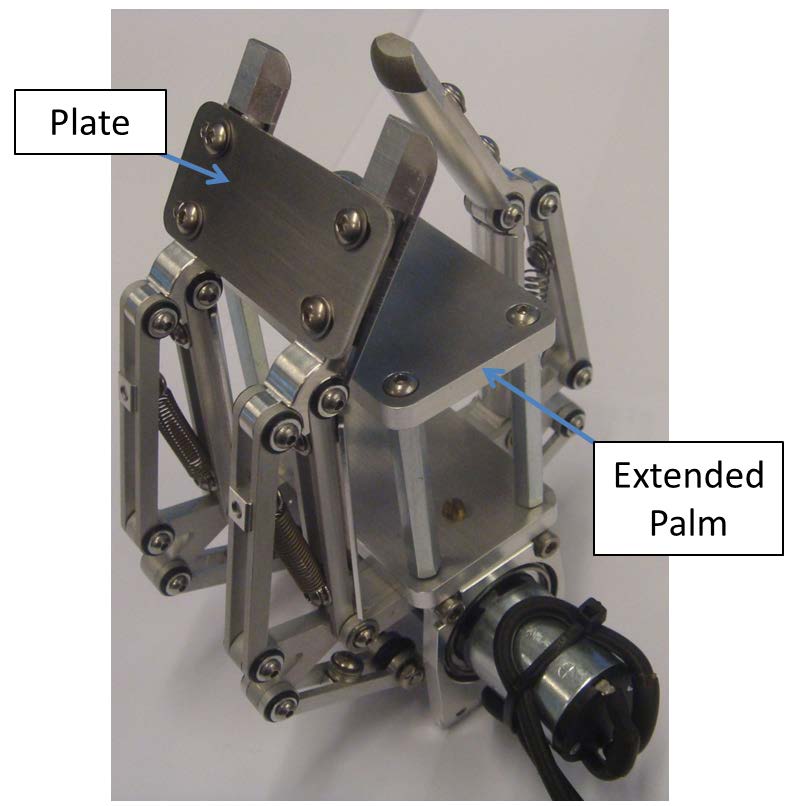
Recent disasters, the nuclear meltdown of the Fukushima reactors and the Gulf of Mexico oil spill, have shown us the importance of robotics and how we lack knowledge in that field, at least outside a constructed environment. A bit more frequent and smaller disasters are burning houses. Firefighters risk their own lives by going into burning houses in search of people that might still be inside. To minimize their risks a mobile reconnaissance robot could be sent in first to inspect the house by locating the origin of the fire, possible threats and identify the location of people for the firefighters to rescue. By receiving this information as soon as possible the severity of the threat can be assessed and proper precautions can be taken in time. Robots are usually operated by a human in dangerous environments because of the sophisticated cognitive capabilities of the human. The human can resolve unexpected situations that autonomous robots can still not do. The task should be performed as fast as possible as time is a very critical factor. One of the most time-consuming activities is the opening of doors. Literature suggests a real need for some sort of compliance in the robots to successfully open doors. The reason for that is that compliance decreases the need for accurate positioning of the robot with regard to the door and door handle. One way to accomplish that is to add a compliant hand (e.g. an underactuated hand).
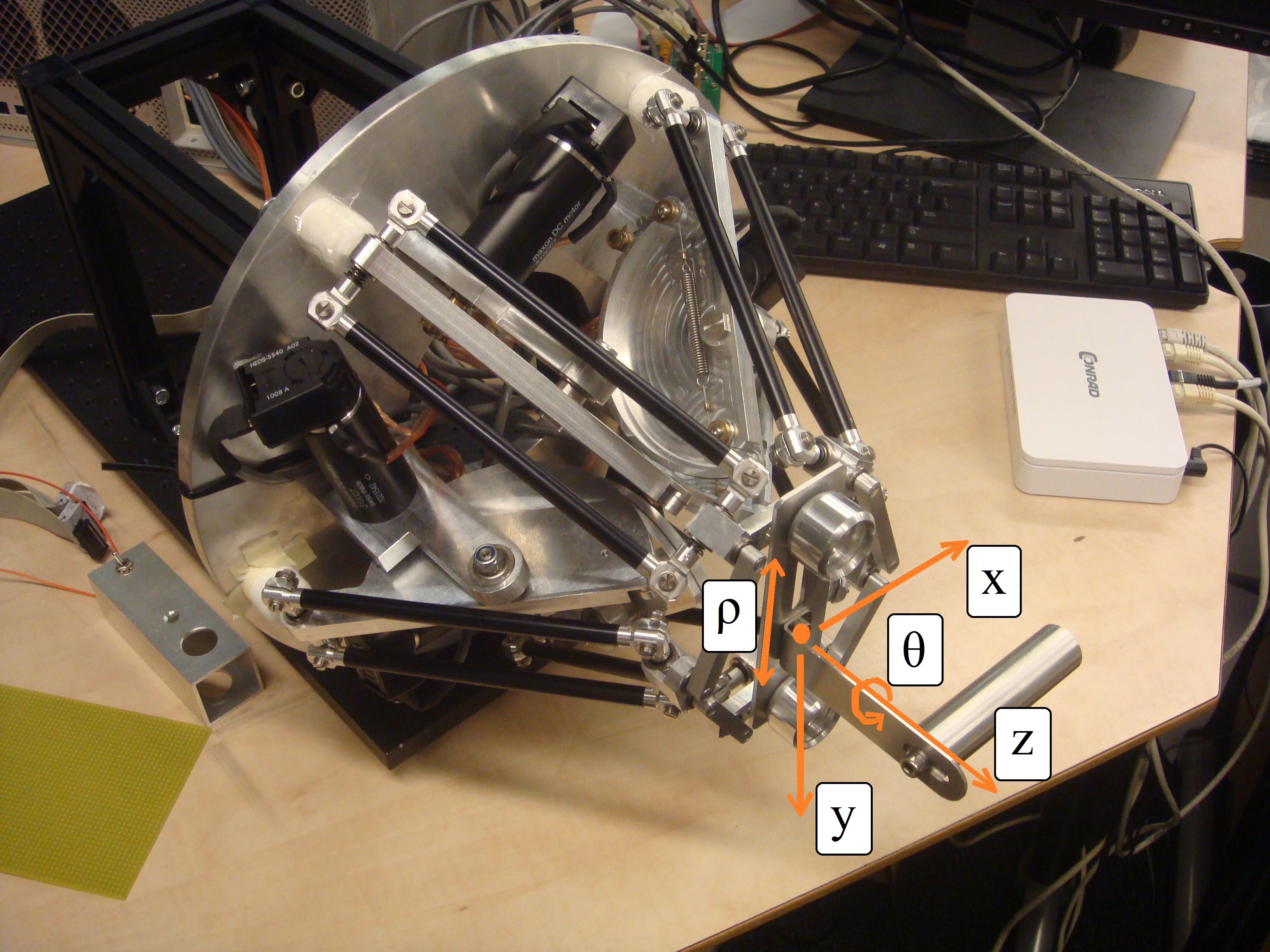
Another way to improve a door opening task is to use Shared Control to guide the human operator to approach the door and guide him with unlatching the door open. Shared Control helps the operator to be more accurate in his movements. Therefore in this study an experiment was perform to analyze the influence of Shared Control and an Underactuated hand when a human operator remotely controls a non-holonomic, non-redundant mobile robot during the unlatching of a door.

Status:
Completed
Project Output:
Acknowledgement:
The under actuated robotic gripper and the robot platform were kindly provided by Dr.ir. Martijn Wisse through the Delft Robotics Lab.