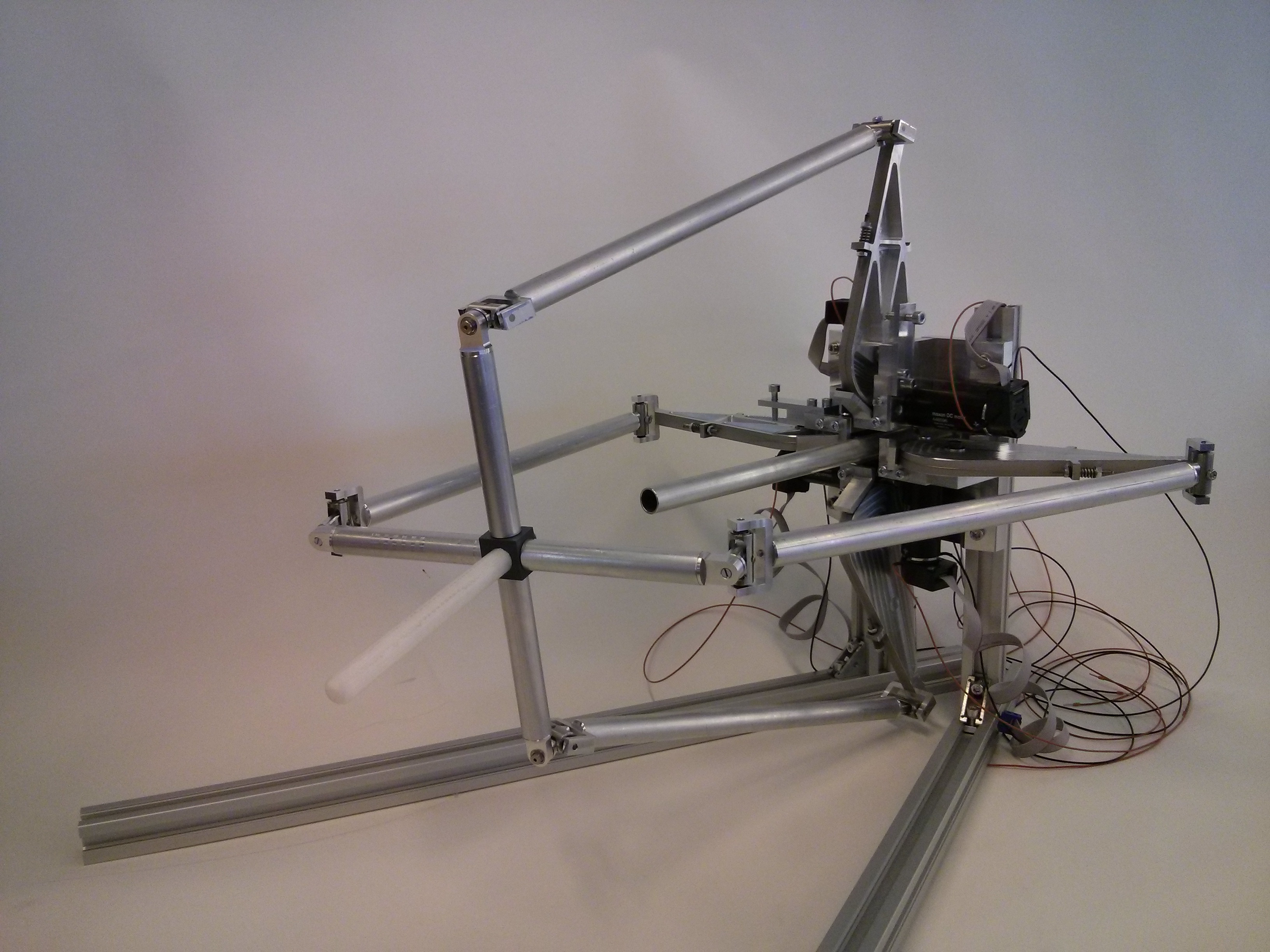
Parallel Haptic Master Device for Needle Steering
Developed by: Teun HoevenaarsOperational since: 2015
Abstract
This 3-DoF parallel haptic master device has been developed by Teun Hoevenaars at the Delft Haptics Lab for the purpose of needle steering, during the H-Haptics Programme. The DoFs are one linear translation and two rotations perpendicular to the translation axis, controlled by a Bachmann industrial controller. These DoFs correspond to those of the steerable needles developed at the TU Delft MISIT lab (www.misit.nl).
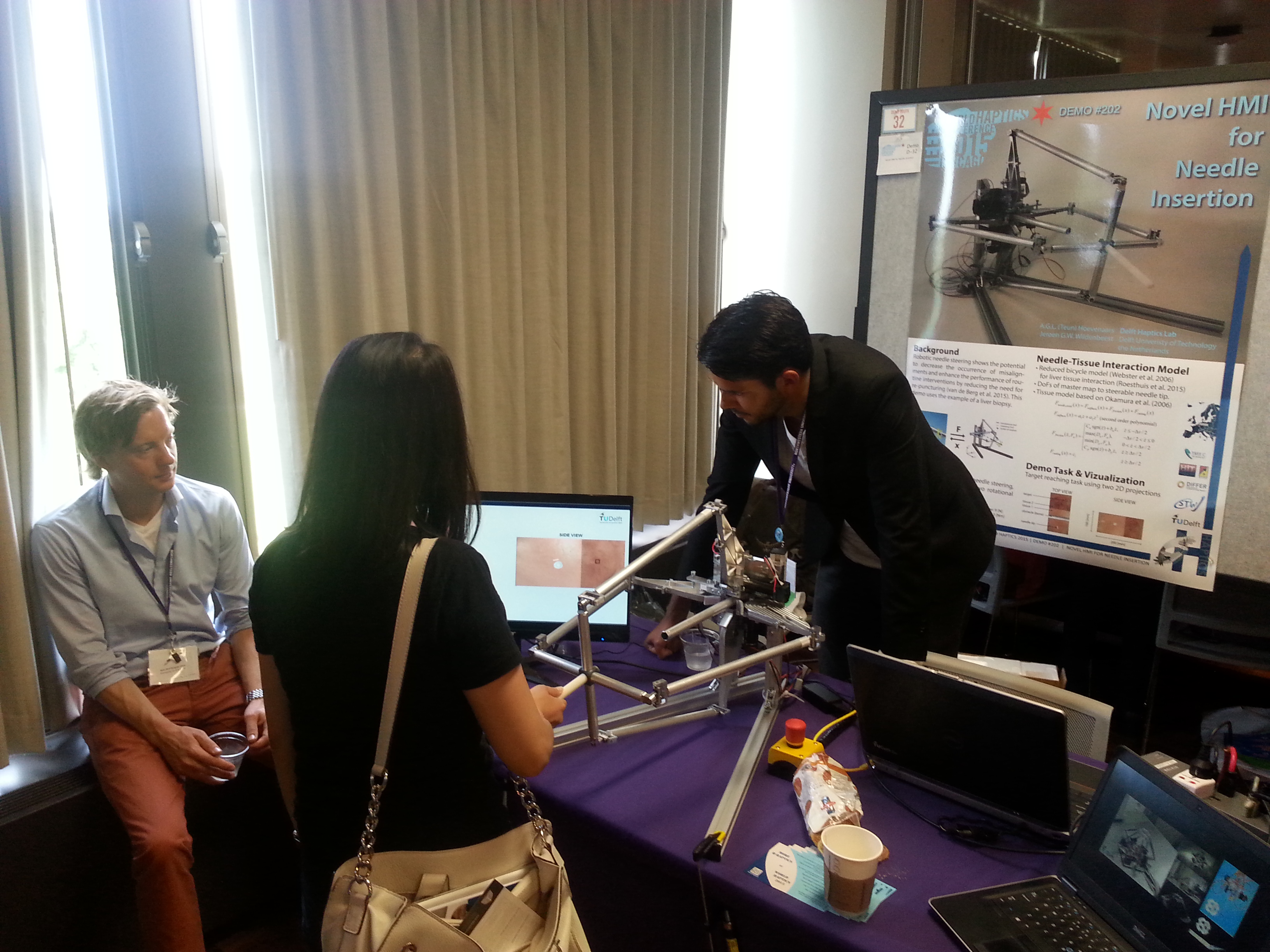
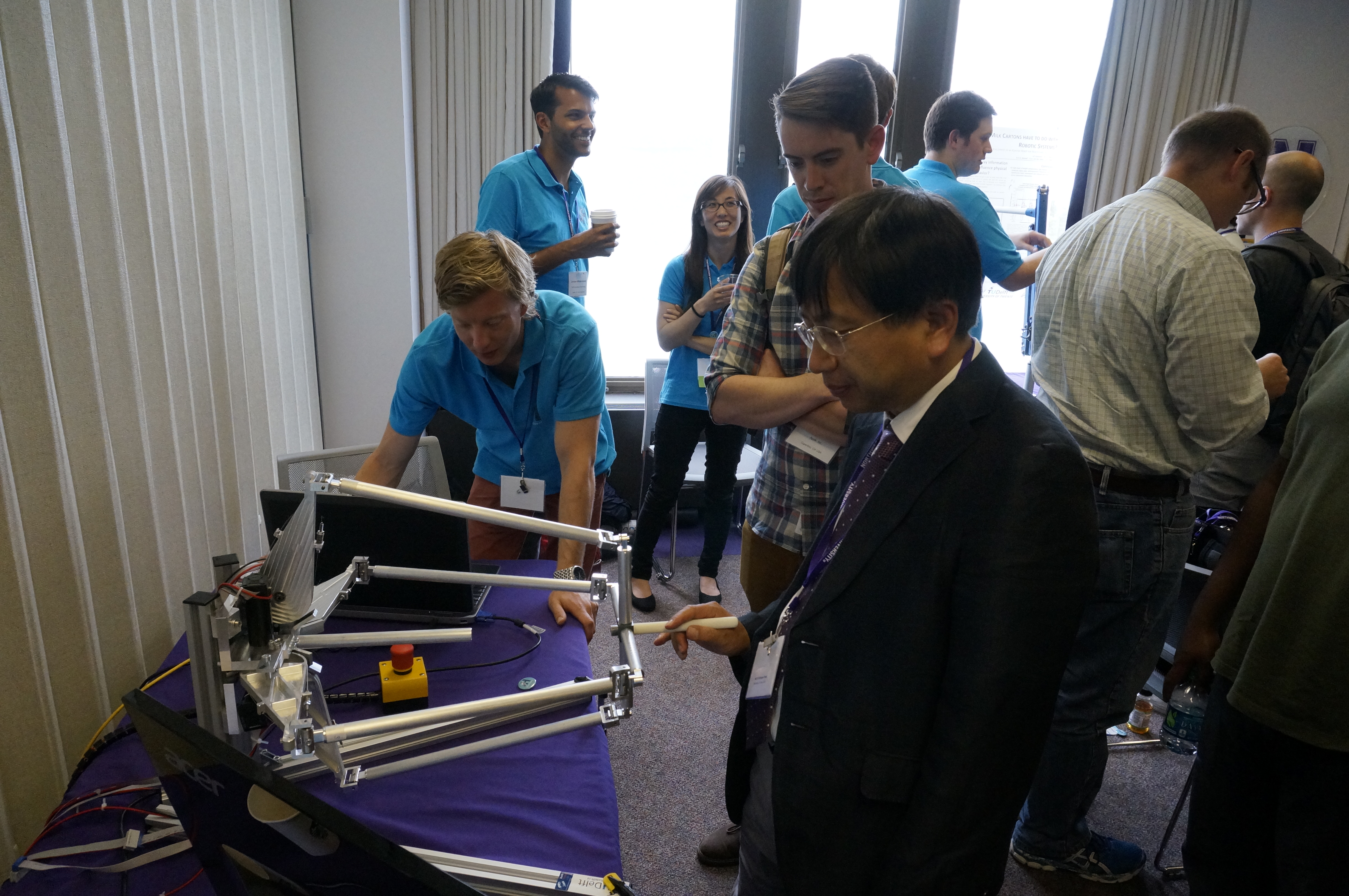
It was first demonstrated at the H-Haptics Tutorial at the World Haptics Conference 2015, and subsequently won the ASME Design award.

{kind=link}
Associated Research Programmes:
Associated Research Projects:
Acknowledgement:
This device was made during the H-Haptics programme, sponsored by STW.