“Munin” – 3 DOF telemanipulator
Developed by: Goran ChristianssonOperational since: 2007
Abstract
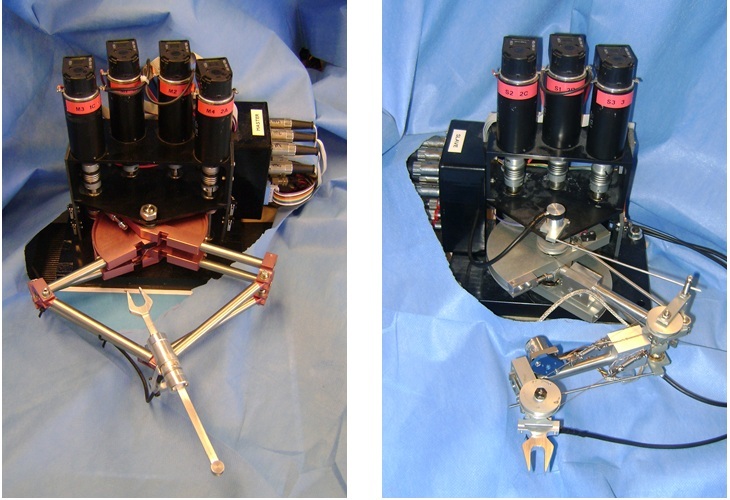
The “Munin” telemanipulation system is a 3-degree of freedom (DOF) haptic teleoperator based on the ”hard-soft” principle. The mechatronic concept of using a stiff master and a compliant slave has previously been shown to improve haptic teleoperation performance. The master device (figure below, left image) consists of a stiff double-rhomb force-redundant parallel robot and the slave device (figure below, right image) is a serial robot with flexible joints.
A video of the Munin:
In 2017, the Munin was redesigned by Alfons Schure, making it easier to use and transport.
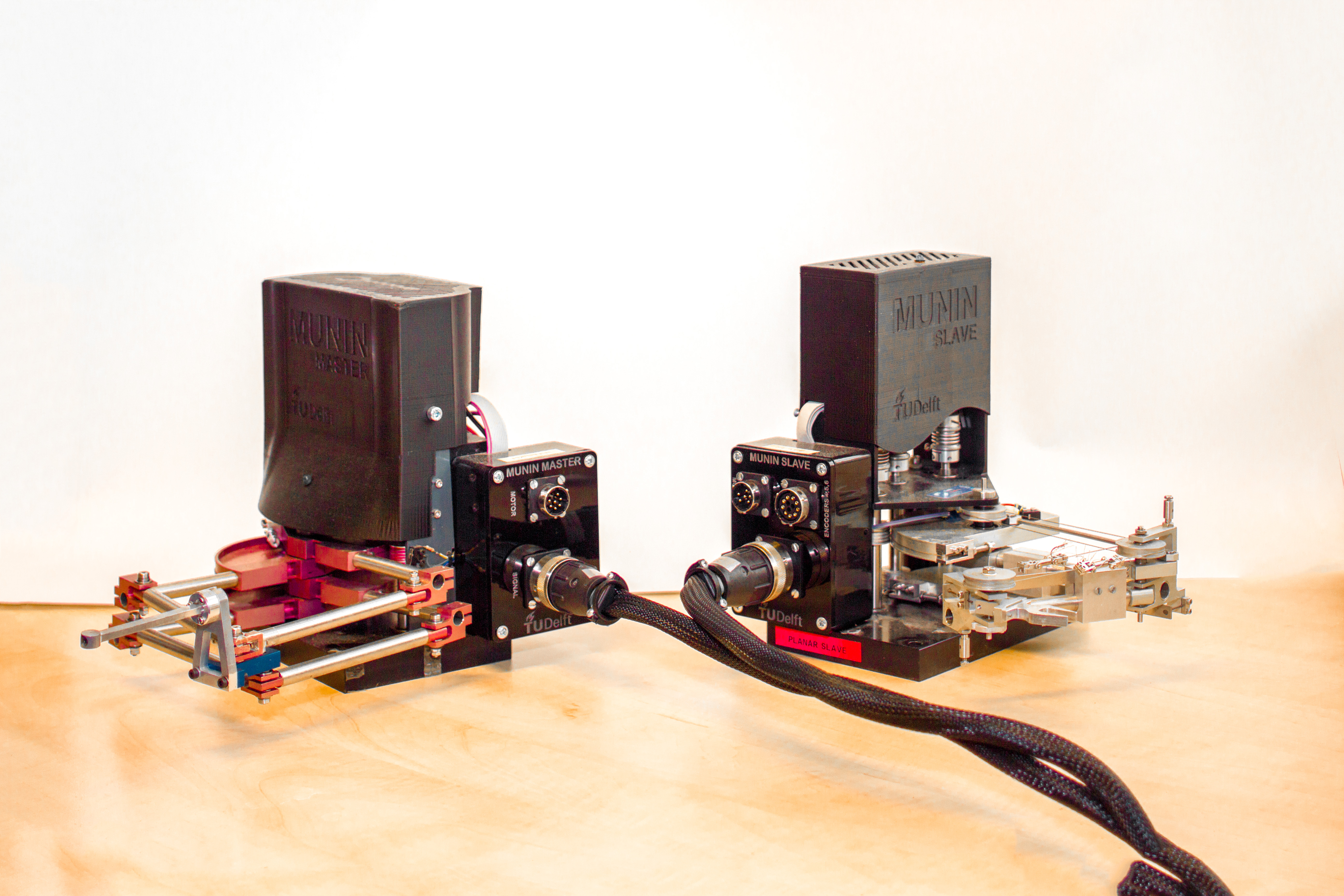
The Munin after Alfons Schure redesigned the housing (2017)
Associated Research Programmes:
Associated Research Projects:
- Effective Control Interfaces and Shared Control for Telemanipulation
- Haptic shared control improves teleoperated task performance towards performance in direct control
- Improving the Quality of Haptic Feedback Yields Only Marginal Improvements in Teleoperated Task Performance
- Machine Learning for Haptic Shared Control in Telerobotics
- Model-Based Control of a Parallel Haptic Master Device
- Rubber Hand Illusion for Telemanipulation
- The Effect of Online Adaptation on Conflicts in Haptic Shared Control for Free-Air Teleoperation Tasks
Selected Output:
Acknowledgement:
This device was developed by Goran Christiansson, and has been adapted to be used in our new shared control research by Henri Boessenkool & Jeroen Wildenbeest during their MSc theses.