HapticMaster
Developed by: Moog FCS RoboticsAbstract
The HapticMaster is a commercial 3-DoF haptic device developed by Moog FCS Robotics. It was acquired for the H-Haptics programme, and was used in several studies (e.g., by Tricia Gibo, Jack Schorsch).
Roel Kuiper ensured the system can run through Bachmann controllers. This allows a SIMULINK environment to manipulate virtual dynamics, forces and perturbations; making it easy to be used by BSc and MSc students.

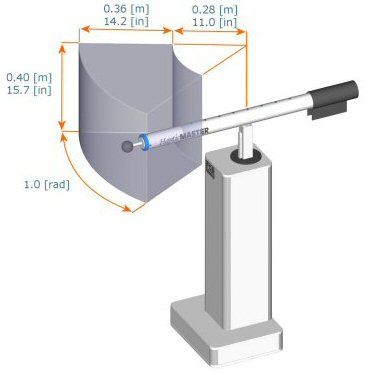
It is an admittance (force controlled) device and is thus capable of rendering high stiffnesses and forces with minimal friction. It features a position resolution of 4 x 10^-6 to 12 x 10^-6 m (depending on the position), maximum stiffness of 10 x 10^3 to 50 x 10^3 N/m (depending on the position), and nominal/maximum force of 100/250 N. It has a workspace of 80 x 10^-3 m^3. As it is an admittance controlled device, it has a force sensor in the end effector, which can in turn be used to measure human-machine interaction forces. For more information on the HapticMaster, visit the Moog website.