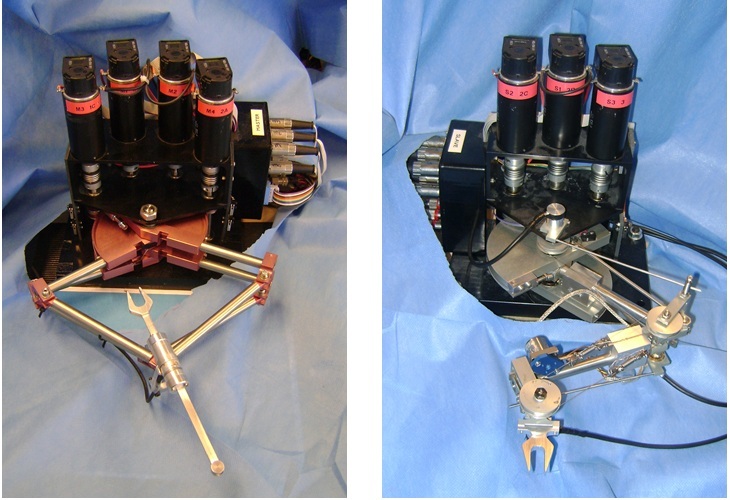
"Gemini" - dual 1 DOF master devices
Developed by: Roel Kuiper, Leroy Boerefijn, Ward Heij, Marijn Flipse, Wilco Vreugdenhil, Kang Wang |
Operational since: 2014 (until March 2017)
The Gemini are a set of identical 1 DOF haptic manipulators, that can be linked through a Bachmann industrial controller to act as a master-slave tele ma...